
I am a Ph.D. candidate in Computer Science in the Khoury College of Computer Sciences at Northeastern University. I am working in The Helping Hands Lab and Geometric Learning Lab, advised by Professor Robert Platt and Professor Robin Walters. My research interests include Machine Learning and Robotics. Recently, my research has focused on applying equivariant machine learning methods to robotic manipulation to improve learning efficiency.
Prior to the Ph.D. program, I received my Master’s degree in Computer Science from Northeastern University and my Bachelor’s degree in Computer Science and Technology from Sichuan University, Chengdu, China.
Email: wang dot dian at northeastern dot edu. CV: link.
News
- 07/2024: We are organizing the Workshop on Geometric and Algebraic Structure in Robot Learning at RSS 2024.
- 06/2024: I am proud to be part of the Khoury Story!
- 04/2024: I will be returning to the Boston Dynamic AI Institute as a summer intern.
- 09/2023: Our paper A General Theory of Correct, Incorrect, and Extrinsic Equivariance is accepted at NeurIPS 2023.
- 07/2023: Recording of our Workshop on Symmetries in Robot Learning is available here.
- 06/2023: I am honored to receive the 2023 JP Morgan Chase PhD Fellowship!
- 04/2023: I give a guest lecture, Equivariant Learning for Robotic Manipulation. The lecture summarizes our latest research, so be sure to check it out!
- 03/2023: We are organizing the Workshop on Symmetries in Robot Learning at RSS 2023.
- 02/2023: I will be joining the Boston Dynamic AI Institute as a summer intern.
- 01/2023: Our paper The Surprising Effectiveness of Equivariant Models in Domains with Latent Symmetry is accepted at ICLR 2023 as a spotlight presentation.
- 01/2023: Two papers are accepted at ICRA 2023.
Publication
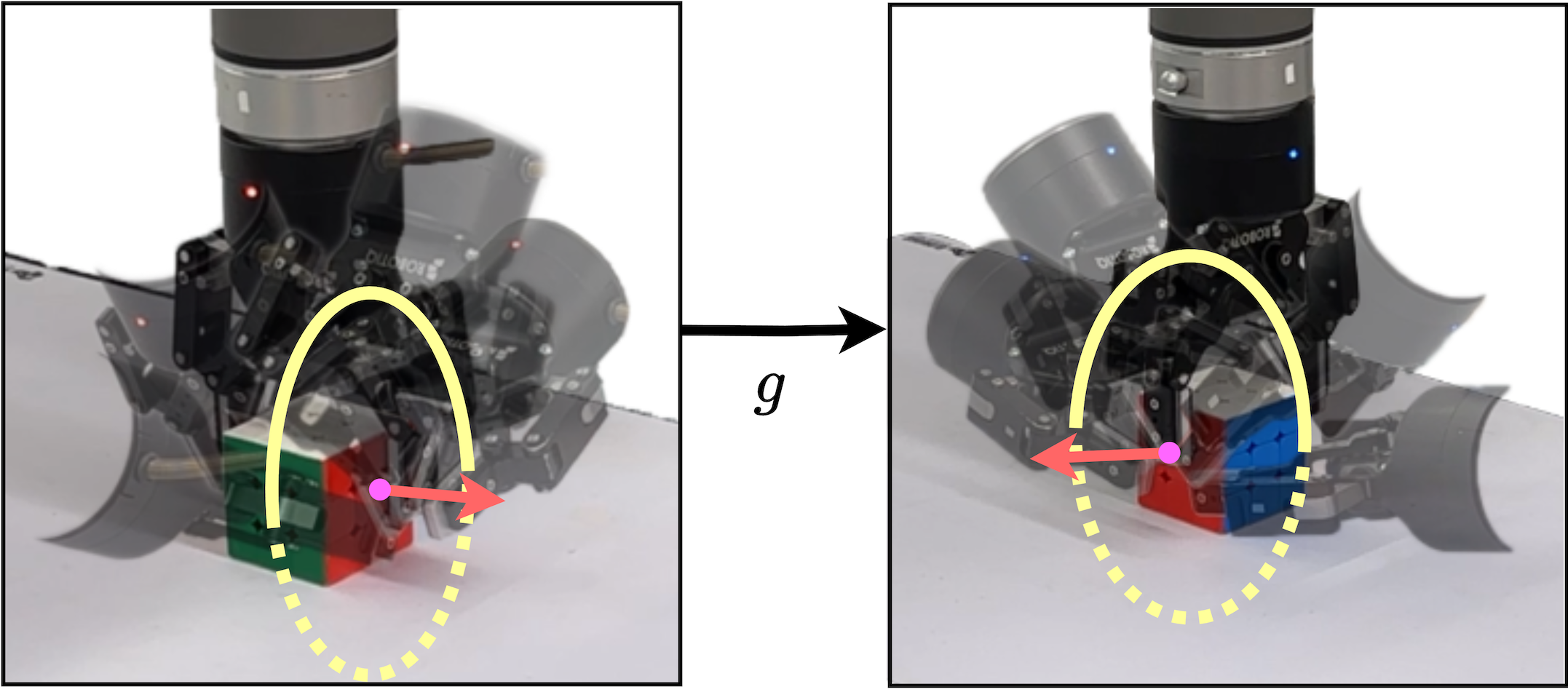
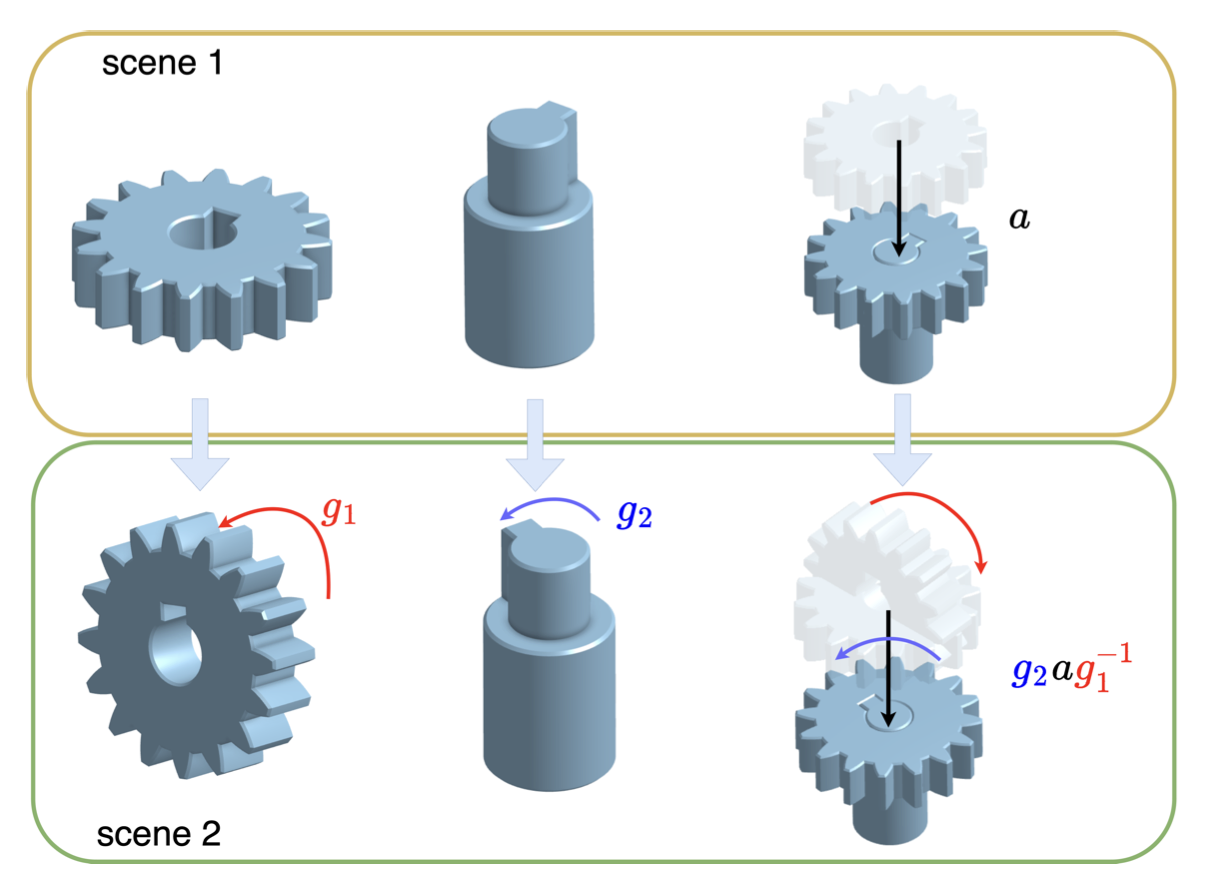
 Equivariant Diffusion Policy
Equivariant Diffusion Policy
Dian Wang, Stephen Hart, David Surovik, Tarik Kelestemur, Haojie Huang, Haibo Zhao, Mark Yeatman, Jiuguang Wang, Robin Walters, Robert Platt
Preprint
 OrbitGrasp: SE(3)-Equivariant Grasp Learning
OrbitGrasp: SE(3)-Equivariant Grasp Learning
Boce Hu, Xupeng Zhu*, Dian Wang*, Zihao Dong*, Haojie Huang*, Chenghao Wang*, Robin Walters, Robert Platt
Preprint
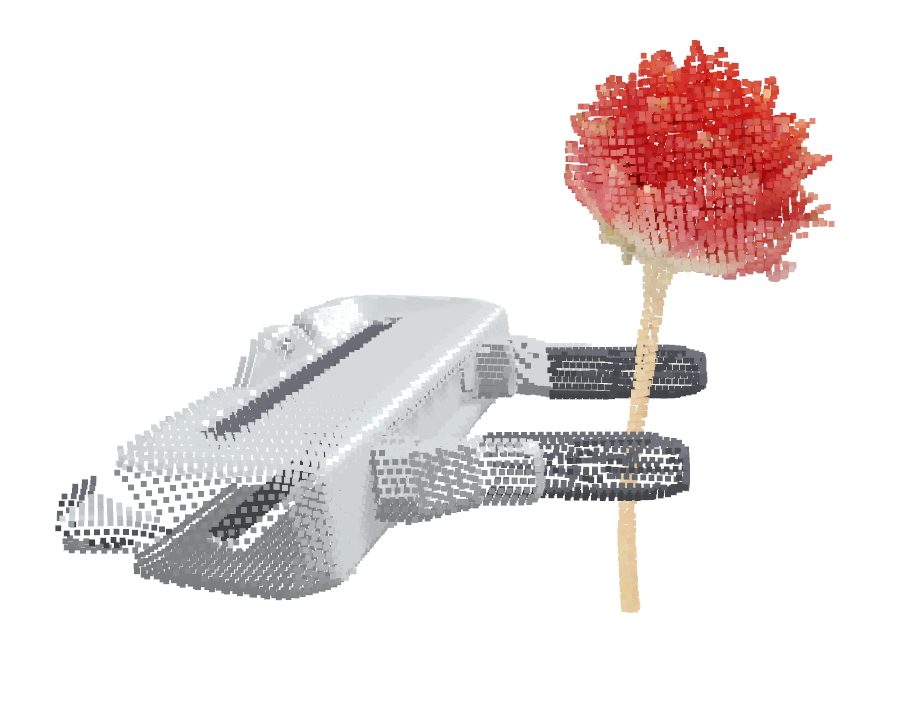 IMAGINATION POLICY: Using Generative Point Cloud Models for Learning Manipulation Policies
IMAGINATION POLICY: Using Generative Point Cloud Models for Learning Manipulation Policies
Haojie Huang, Karl Schmeckpeper*, Dian Wang*, Ondrej Biza*, Yaoyao Qian, Haotian Liu, Mingxi Jia, Robert Platt, Robin Walters
Preprint
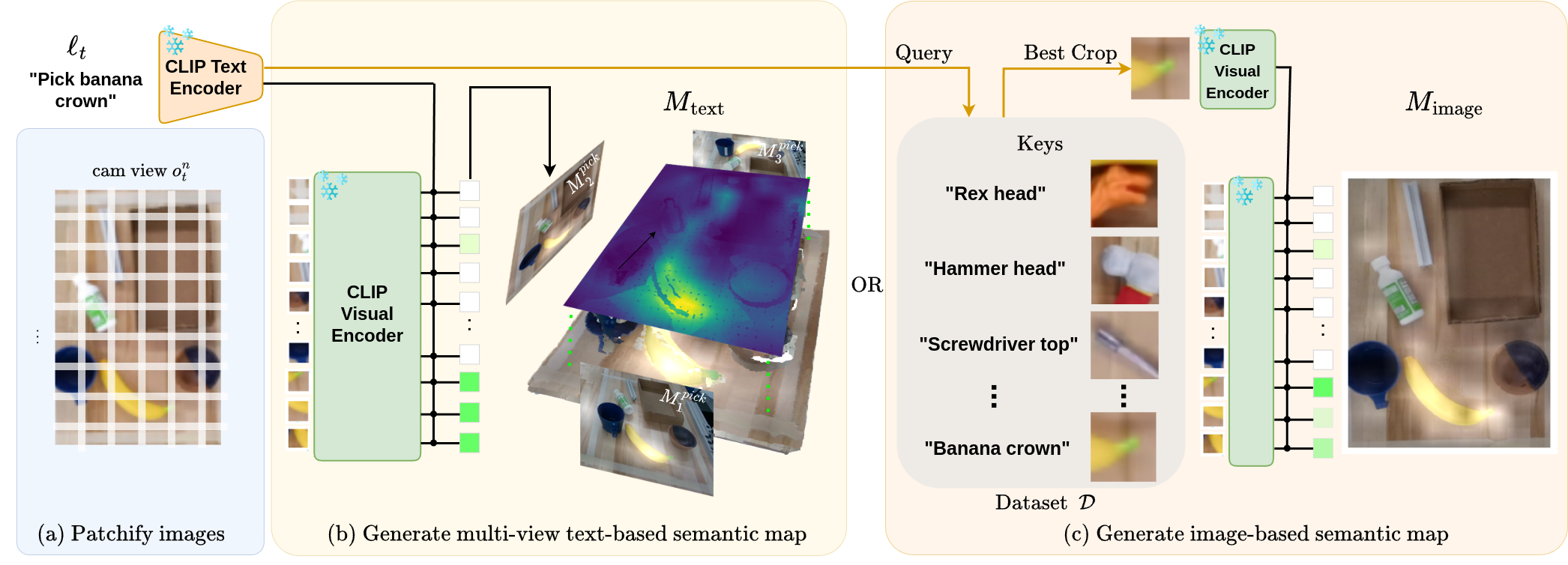 Open-vocabulary Pick and Place via Patch-level Semantic Maps
Open-vocabulary Pick and Place via Patch-level Semantic Maps
Mingxi Jia, Haojie Huang, Zhewen Zhang, Chenghao Wang, Linfeng Zhao, Dian Wang, Jason Xinyu Liu, Robin Walters, Robert Platt, Stefanie Tellex
Preprint
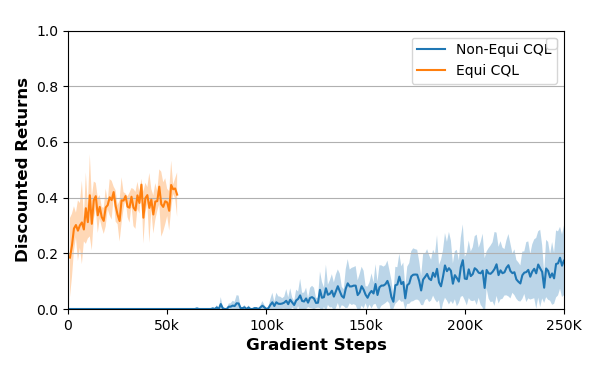 Equivariant Offline Reinforcement Learning
Equivariant Offline Reinforcement Learning
Arsh Tangri, Ondrej Biza, Dian Wang, David Klee, Owen Howell, Robert Platt
Preprint
 Fourier Transporter: Bi-Equivariant Robotic Manipulation in 3D
Fourier Transporter: Bi-Equivariant Robotic Manipulation in 3D
Haojie Huang, Owen Lewis Howell*, Dian Wang*, Xupeng Zhu*, Robert Platt†, Robin Walters†
ICLR 2024, Vienna, Austria
 Leveraging Symmetries in Pick and Place
Leveraging Symmetries in Pick and Place
Haojie Huang, Dian Wang, Arsh Tangri, Robin Walters†, Robert Platt†
The International Journal of Robotics Research. 2023
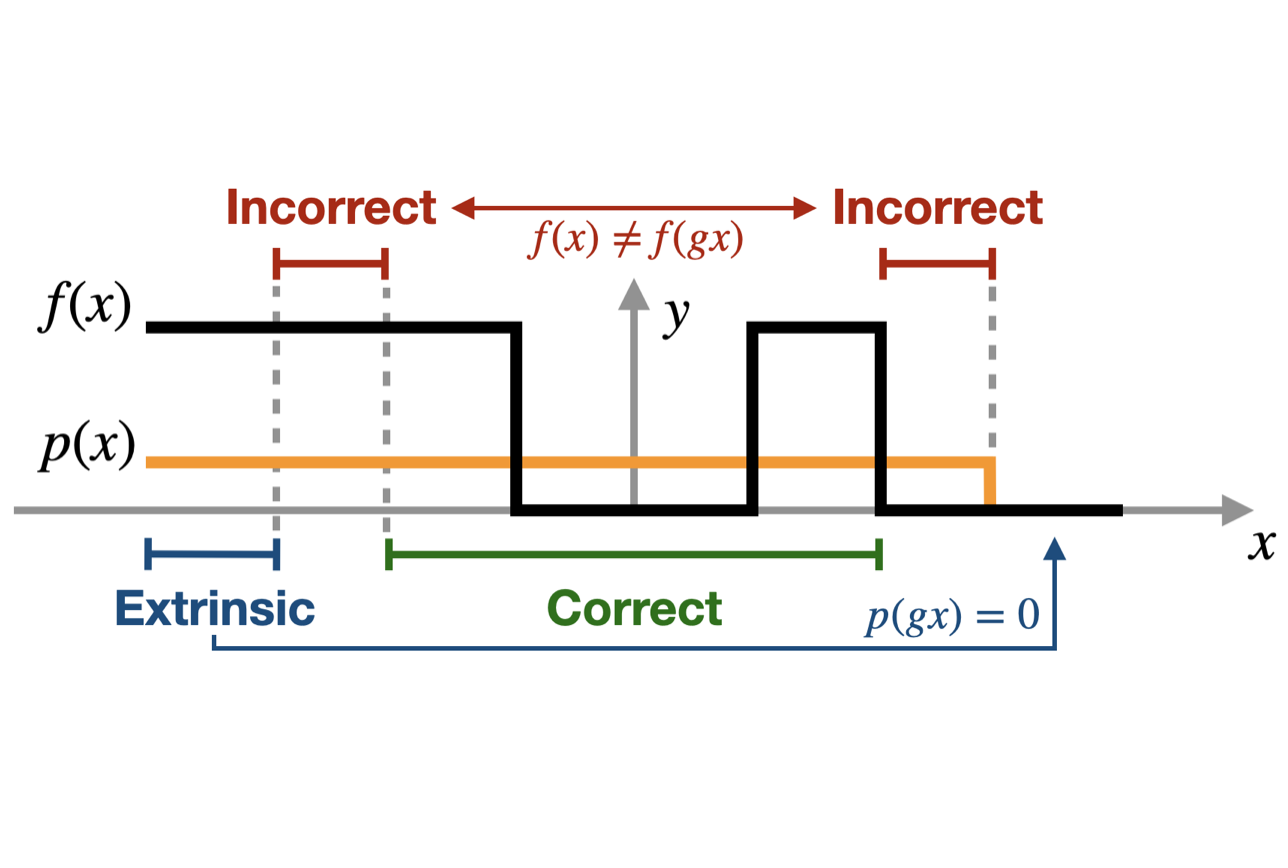 A General Theory of Correct, Incorrect, and Extrinsic Equivariance
A General Theory of Correct, Incorrect, and Extrinsic Equivariance
Dian Wang, Xupeng Zhu, Jung Yeon Park, Mingxi Jia, Guanang Su, Robert Platt, Robin Walters
NeurIPS 2023, New Orleans, Louisiana, USA
 Equivariant Reinforcement Learning under Partial Observability
Equivariant Reinforcement Learning under Partial Observability
Hai Huu Nguyen, Andrea Baisero, David Klee, Dian Wang, Robert Platt, Christopher Amato
CoRL 2023, Atlanta, Georgia, USA
 On Robot Grasp Learning Using Equivariant Models
On Robot Grasp Learning Using Equivariant Models
Xupeng Zhu, Dian Wang, Guanang Su, Ondrej Biza, Robin Walters, Robert Platt
Autonomous Robots. 2023
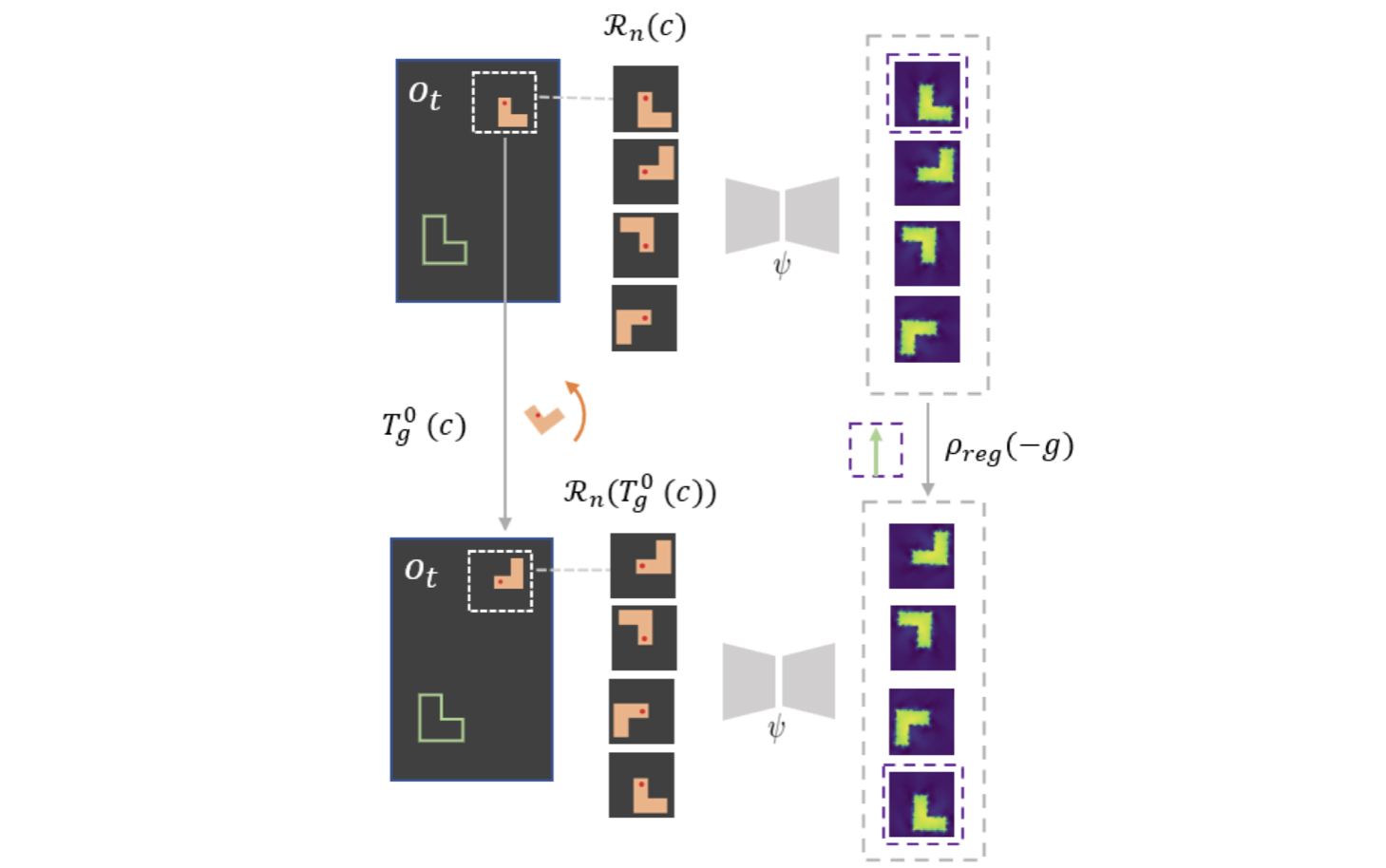
 The Surprising Effectiveness of Equivariant Models in Domains with Latent Symmetry
The Surprising Effectiveness of Equivariant Models in Domains with Latent Symmetry
Dian Wang, Jung Yeon Park, Neel Sortur, Lawson L.S. Wong, Robin Walters†, Robert Platt†
ICLR 2023, Kigali, Rwanda, Spotlight
NeurIPS 2023 Workshop on Symmetry and Geometry in Neural Representations
 SEIL: Simulation-augmented Equivariant Imitation Learning
SEIL: Simulation-augmented Equivariant Imitation Learning
Mingxi Jia*, Dian Wang*, Guanang Su, David Klee, Xupeng Zhu, Robin Walters, Robert Platt
ICRA 2023, London, UK
CoRL 2022 Workshop on Sim-to-Real Robot Learning
 Edge Grasp Network: Graph-Based SE(3)-invariant Approach to Grasp Detection
Edge Grasp Network: Graph-Based SE(3)-invariant Approach to Grasp Detection
Haojie Huang, Dian Wang, Xupeng Zhu, Robin Walters, Robert Platt
ICRA 2023, London, UK
CoRL 2022 Workshop on Sim-to-Real Robot Learning
RSS 2023 Workshop on Symmetries in Robot Learning
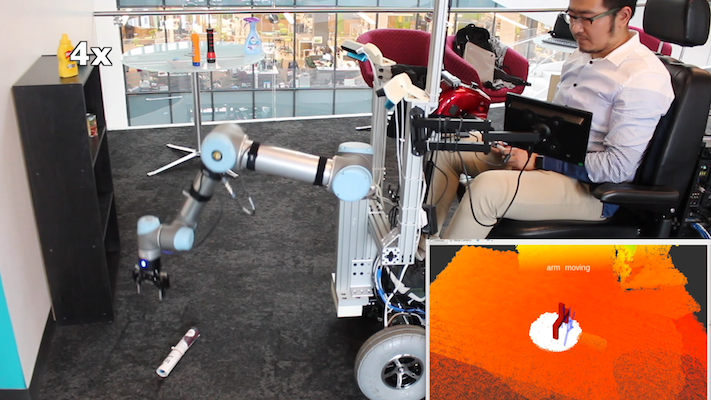
 On-Robot Learning With Equivariant Models
On-Robot Learning With Equivariant Models
Dian Wang, Mingxi Jia, Xupeng Zhu, Robin Walters, Robert Platt
CoRL 2022, Auckland, New Zealand
 Leveraging Fully Observable Policies for Learning under Partial Observability
Leveraging Fully Observable Policies for Learning under Partial Observability
Hai Huu Nguyen, Andrea Baisero, Dian Wang, Christopher Amato, Robert Platt
CoRL 2022, Auckland, New Zealand
 BulletArm: An Open-Source Robotic Manipulation Benchmark and Learning Framework
BulletArm: An Open-Source Robotic Manipulation Benchmark and Learning Framework
Dian Wang*, Colin Kohler*, Xupeng Zhu, Mingxi Jia, Robert Platt
ISRR 2022, Geneva, Switzerland
![]() Equivariant Transporter Network
Equivariant Transporter Network
Haojie Huang, Dian Wang, Robin Walters, Robert Platt
RSS 2022, New York City, New York, USA
RLDM 2022
ICRA 2022 Workshop on Scaling Robot Learning, Best Paper Award Finalist
 Sample Efficient Grasp Learning Using Equivariant Models
Sample Efficient Grasp Learning Using Equivariant Models
Xupeng Zhu, Dian Wang, Ondrej Biza, Guanang Su, Robin Walters, Robert Platt
RSS 2022, New York City, New York, USA
ICRA 2022 Workshop on Scaling Robot Learning, Spotlight
 SO(2)-Equivariant Reinforcement Learning
SO(2)-Equivariant Reinforcement Learning
Dian Wang, Robin Walters, Robert Platt
ICLR 2022, Virtual, Spotlight
RLDM 2022
ICRA 2022 Workshop on Scaling Robot Learning, Spotlight
 Equivariant Q Learning in Spatial Action Spaces
Equivariant Q Learning in Spatial Action Spaces
Dian Wang, Robin Walters, Xupeng Zhu, Robert Platt
CoRL 2021, London, UK
RSS 2022 Workshop on Scaling Robot Learning, Spotlight
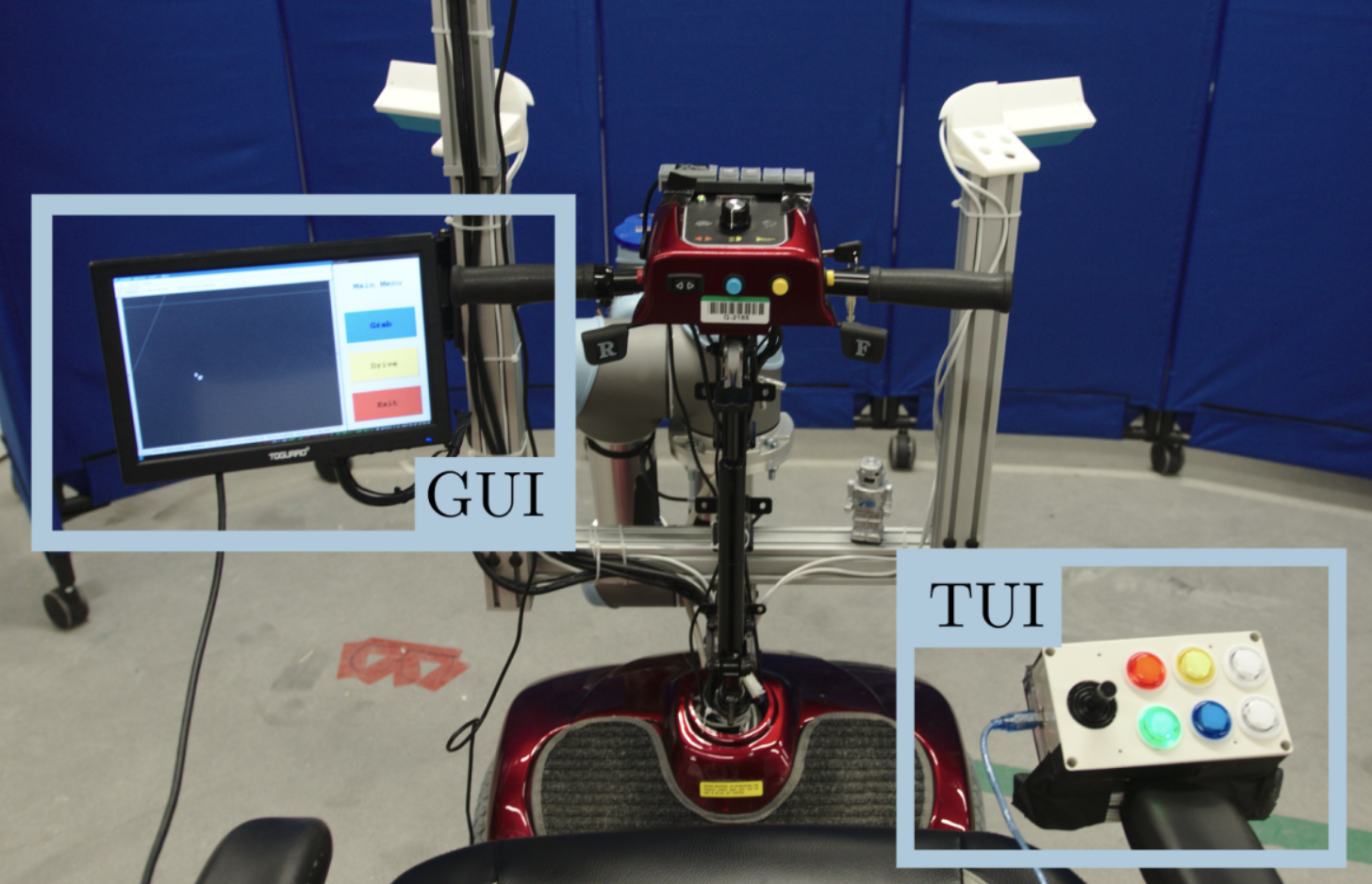 Design Guidelines for Human-Robot Interaction with Assistive Robot Manipulation Systems
Design Guidelines for Human-Robot Interaction with Assistive Robot Manipulation Systems
Alexander Wilkinson, Michael Gonzales, Patrick Hoey, David Kontak, Dian Wang, Noah Torname, Amelia Sinclaire, Zhao Han, Jordan Allspaw, Robert Platt, Holly Yanco
Paladyn, Journal of Behavioral Robotics. 2021
 Action Priors for Large Action Spaces in Robotics
Action Priors for Large Action Spaces in Robotics
Ondrej Biza, Dian Wang, Robert Platt, Jan-Willem van de Meent, Lawson LS Wong
AAMAS 2021, London, UK
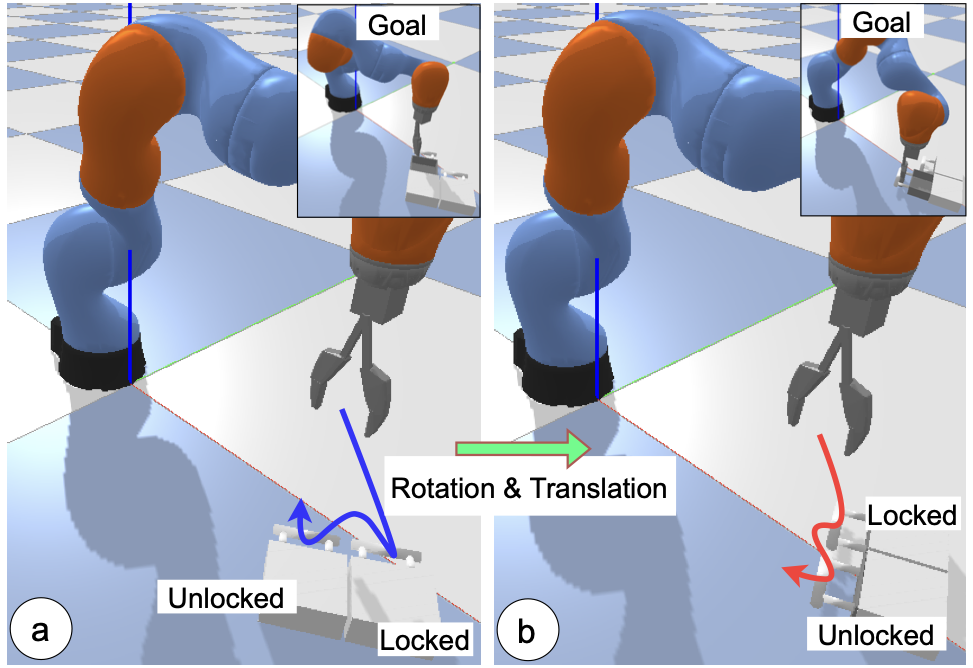
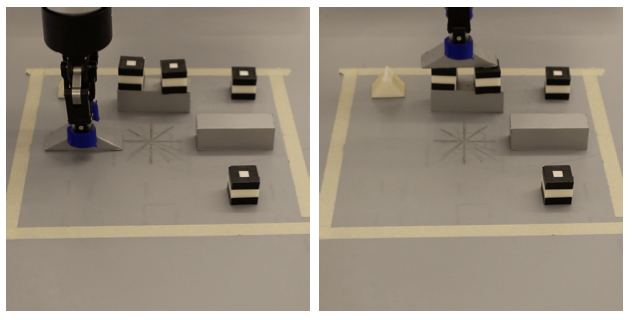
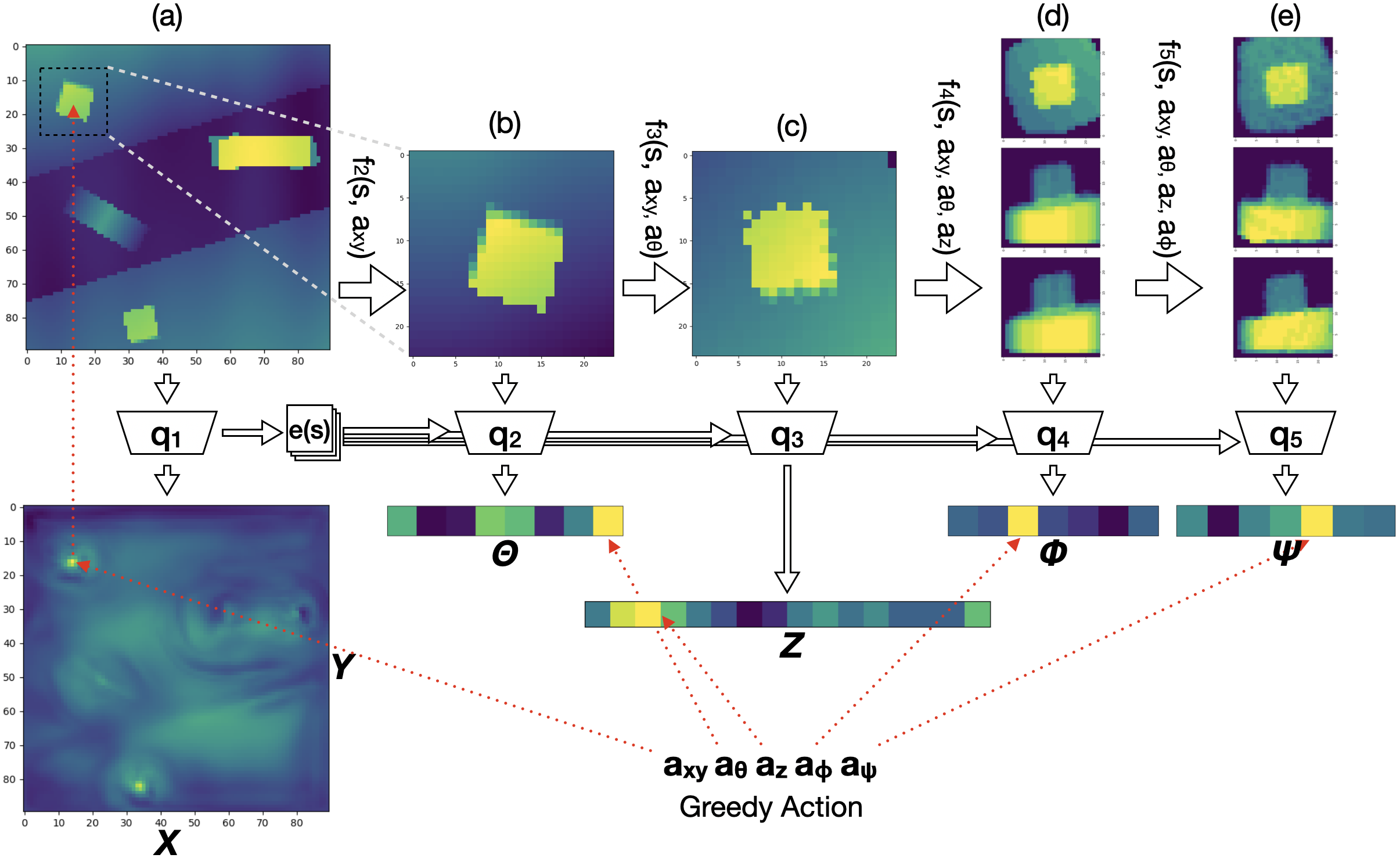 Policy learning in SE (3) action spaces
Policy learning in SE (3) action spaces
Dian Wang, Colin Kohler, Robert Platt
CoRL 2020, Boston, Massachusetts, USA
 Towards Assistive Robotic Pick and Place in Open World Environments
Towards Assistive Robotic Pick and Place in Open World Environments
Dian Wang, Colin Kohler, Andreas ten Pas, Alexander Wilkinson, Maozhi Liu, Holly Yanco, Robert Platt
ISRR 2019, Hanoi, Vietnam
* indicates equal contribution; † indicates equal advising.
Service
Organizer: RSS2023 Workshop on Symmetries in Robot Learning; RSS 2024 Workshop on Geometric and Algebraic Structure in Robot Learning
Reviewer: IJRR2024. ICML 2024. ICLR 2023-2024. NeurIPS 2023. ICRA 2019, 2022-2024. CoRL 2022-2024. IROS 2021, 2023. RAL 2022-2024. T-RO 2022.
Education
- (2020-Present) PhD student, Computer Science, Northeastern University, Boston, USA
- (2017-2019) M.S, Computer Science, Northeastern University, Boston, USA
- (2013-2017) B.Eng, Computer Science & Technology, Sichuan University, Chengdu, China